HAPTIC Technology

Users are given the illusion that they are touching or Manipulating a real Physical Object ‘Haptics’ is a technology that adds the sense of touch to virtual environments..
This seminar discusses the important concepts in Haptics, some of the most commonly used haptics systems like ‘Phantom’, ‘Cyber glove’, ‘Novint Falcon’ and such similar devices. Following this, a description about how sensors and actuators are used for tracking the position and movement of the haptic systems, is provided.
The different types of force rendering algorithms are discussed next. The seminar explains the blocks in force rendering. Then a few applications of haptic systems are taken up for discussion.
What is ‘Haptics’?
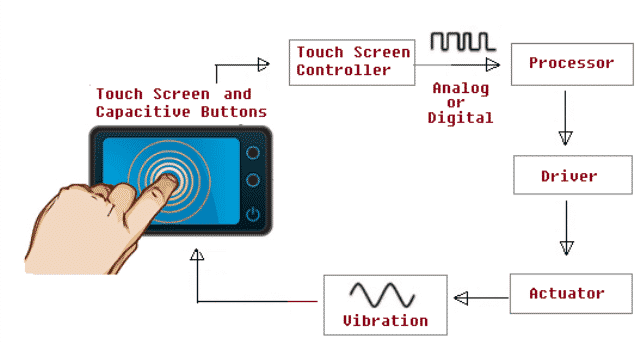
Haptic technology refers to technology that interfaces the user with a virtual environment via the sense of touch by applying forces, vibrations, and/or motions to the user. This mechanical stimulation may be used to assist in the creation of virtual objects (objects existing only in a computer simulation), for control of such virtual objects, and to enhance the remote control of machines and devices (teleoperators). This emerging technology promises to have wide reaching applications as it already has in some fields. For example, haptic technology has made it possible to investigate in detail how the human sense of touch works by allowing the creation of carefully controlled haptic virtual objects.
These objects are used to systematically probe human haptic capabilities, which would otherwise be difficult to achieve. These new research tools contribute to our understanding of how touch and its underlying brain functions work. Although haptic devices are capable of measuring bulk or reactive forces that are applied by the user, it should not to be confused with touch or tactile sensors that measure the pressure or force exerted by the user to the interface.
The term haptic originated from the Greek word ἁπτικός (haptikos) meaning pertaining to the sense of touch and comes from the Greek verb ἅπτεσθαι (haptesthai) meaning to “contact” or “touch.
CONCLUSION
Finally we shouldn’t forget that touch and physical interaction are among the fundamental ways in which we come to understand our world and to effect changes in it. This is true on a developmental as well as an evolutionary level. For early primates to survive in a physical world, as Frank Wilson suggested, “a new physics would eventually have to come into this their brain, a new way of registering and representing the behavior of objects moving and changing under the control of the hand. It is precisely such a representational system—a syntax of cause and effect, of stories, and of experiments, each having a beginning, a middle, and an end— that one finds at the deepest levels of the organization of human language.”
Our efforts to communicate information by rendering how objects feel through haptic technology, and the excitement in our pursuit, might reflect a deeper desire to speak with an inner, physically based language that has yet to be given a true voice.
haptic-technology-8531-4KxjWvN.pdf (1314 KB)